



KR C4控制器加热器产品介绍
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
样条是一种尤其适用于复杂曲线轨道的笛卡尔式运动方式。 这种轨道原则上也可以通过偏向滑过的 LIN 运动和 CIRC 运动生成,但是样条更有优势。
顺滑的 LIN 运动和 CIRC 运动的缺点:
轨道通过不位于轨道上的顺滑点定义。 顺滑区域很难预测。 生成所需的轨
道非常繁琐。在很多情况下会造成减速量很难预计,例如在顺滑区域和很邻近的点。例如如果出于时间原因无法顺滑,则轨道运行会改变。轨道的运行受调节量、速度或加速度的影响。
带 LIN 的曲线轨道:
使用样条的优点:
轨道通过位于轨道上的点定义。 可以简单生成所需轨道。可以保持编程的速度。 只在少数情况下才会出现减速情况。轨道的运行保持不变,不受倍率、速度或加速度的影响。
“工具”子菜单包括下列子程序:
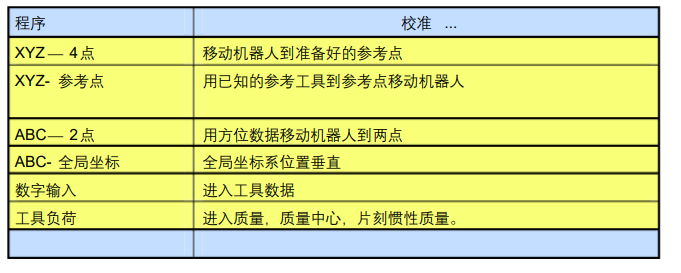
每个这种检测程序,都配有通过对话来对相应的程序进行引导的表格 。
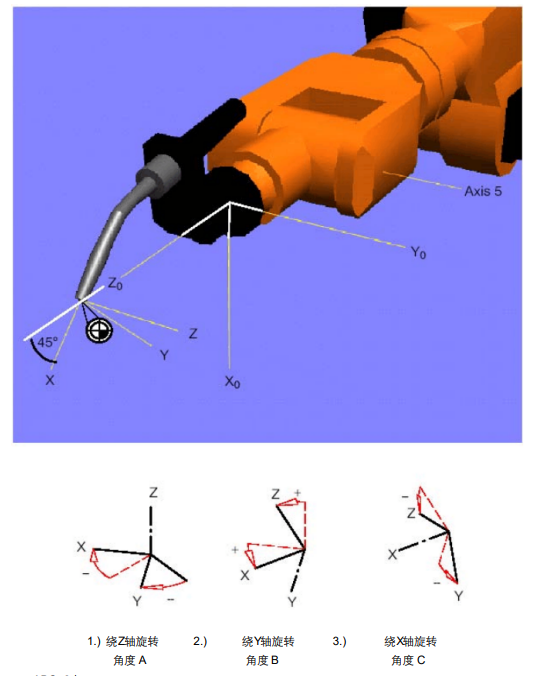
定位的方法使用这些方法确定工具原点相对机器人法兰坐标系原点的位置。
这些方法包括校准程序“ XYZ-4 点”,和“ XYZ- 参考”定向的方法使用这些方法,可以确定全局坐标系相对机器人法兰坐标系的转动关系。 [ABC 依照 Z-Y-X 角度]。这些方法包括校准程序“ ABC-2 点”,和“ XYZ- 全局”
ABC—2点
如果在定位和导向时需要三根工具轴的准确取向时,使用这个方法。它要求画出的点在XY平面的正面,并且在工具 X轴的负方向。
带样条组的曲线轨道:
一个样条运行可以由多个单个运动即样条段组成。 可以对其单独进行示教。 段被连成所谓的样条组并从而构成了整个运动。 机器人控制系统把一个样条组作为一个运动语句进行设计和执行。此外还可以进行单个的 SLIN 和 SCIRC 运动(无样条组) 。所有样条运动的其他特征:如果所有点都在一个平面上,则轨道也在此平面上。如果所有点都位于一条直线上,那么轨道也位于一条直线上。
更多机器人资讯请咨询:库卡机器人配件