



KR C4控制器加热器产品介绍
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
操作步骤 :
1. 将 TCP 移向应被设为目标点的位置。
2. 将光标置于其后应添加运动指令的那一行中。
3. 选择菜单序列 指令 > 运动 > PTP 。
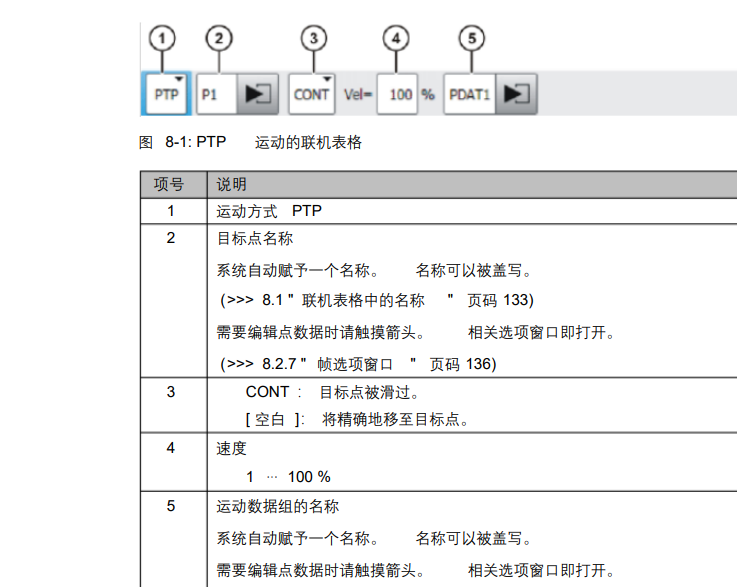
4. 在联机表格中设置参数。
5. 用指令 OK 存储指令。
联机表格 PTP:
对 LIN 运动进行编程:
1. 将 TCP 移向应被设为目标点的位置。
2. 将光标置于其后应添加运动指令的那一行中。
3. 选择菜单序列 指令 > 运动 > LIN 。
4. 在联机表格中设置参数。
5. 用指令 OK 存储指令。
更多机器人资讯请咨询:库卡机器人配件
