



KR C4控制器加热器产品介绍
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
这种方法是,用已校准过的工具,移动待测工具中心点到参考点比照关系的方法,得出工具尺寸。
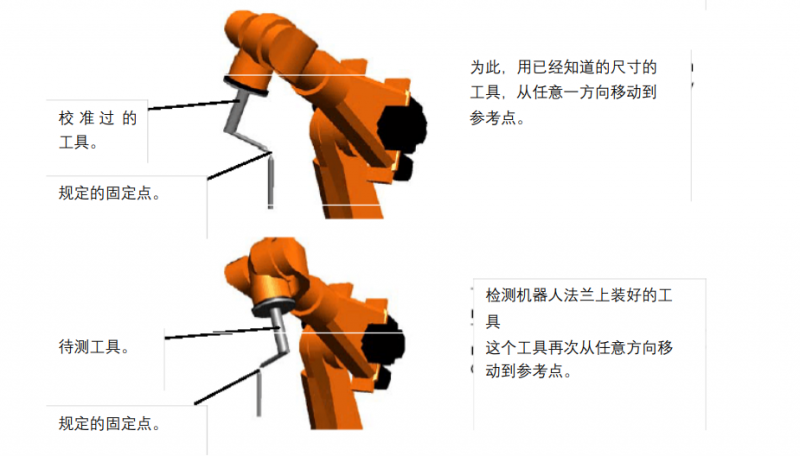
这时, 根据机器人法兰的不同位置和角度以及先前使用的工具的已知的尺寸, 机器人控制部分可以计算待测工具的尺寸。
执行
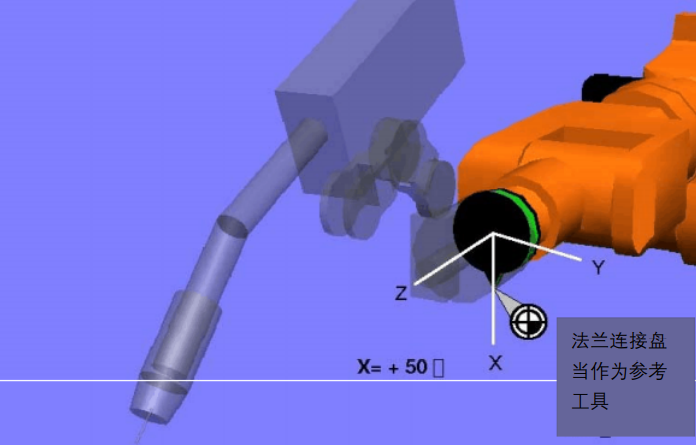
在法兰上安装一个控制部分已经知道尺寸的工具,并且建立一个合适的参考点。 它可以待测工具的尺寸。
使用状态键[在显示屏底部的右边] ,用+/- 键选择想要的工具号。 16 个不同工具的全部 标准数据存储在此。在窗口的底部显示相应工具当前的尺寸或角度。
你能用箭头键从工具名输入条进入,为工具输入名字。
按下软键 “工具准备好” [在显示屏底部] ,以便处理该工具的数据。 数据输入的对话窗口打开。
X,Y,Z 机器人法兰坐标系原点, [位于法兰中心]和参考工具相对于机器人法兰坐标系的工具中心点之间的距离。
机器人能用任意移动键或空间鼠标移动。现在按顺序执行下列步骤:
◆调整需要的工具取向。
◆移动工具中心点到参考点。
◆当工具中心点正确的位于参考点,按下软键“点正确”保存这个位置。
更多机器人资讯请咨询:库卡机器人配件
