



KR C4控制器加热器产品介绍
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
“工具”子菜单包括下列子程序:
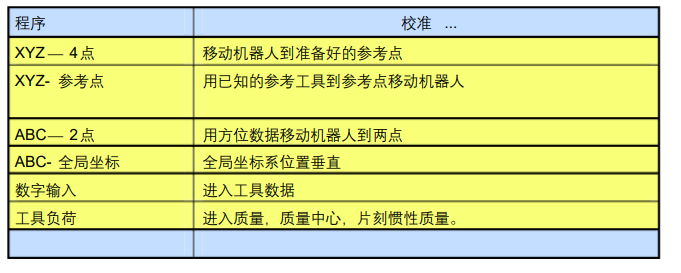
每个这种检测程序,都配有通过对话来对相应的程序进行引导的表格 。
定位的方法使用这些方法确定工具原点相对机器人法兰坐标系原点的位置。
这些方法包括校准程序“ XYZ-4 点”,和“ XYZ- 参考”定向的方法使用这些方法,可以确定全局坐标系相对机器人法兰坐标系的转动关系。 [ABC 依照 Z-Y-X 角度]。这些方法包括校准程序“ ABC-2 点”,和“ XYZ- 全局”
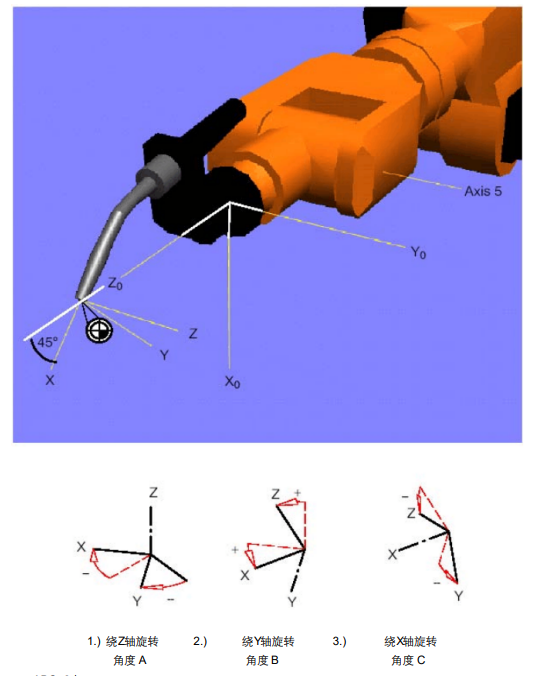
ABC—2点
如果在定位和导向时需要三根工具轴的准确取向时,使用这个方法。它要求画出的点在XY平面的正面,并且在工具 X轴的负方向。
ABC—全局 (5D)
这个方法仅使用在只需要工具的工作方向用来工作和导向时。
ABC—全局 (6D)
如果3个工具轴的取向都必需用于定位和导向时,使用这个方法。
工具定向的方法
如果知道工具的尺寸和角度位置。通过菜单“数字输入”输入。
更多机器人资讯请咨询:库卡机器人配件
